 Thinking about the oceans of useless knowledge and stimuli we get hit with every day, I decided to build a kind of anthropomorphic embodiment of a useless trivia machine.
Thinking about the oceans of useless knowledge and stimuli we get hit with every day, I decided to build a kind of anthropomorphic embodiment of a useless trivia machine.
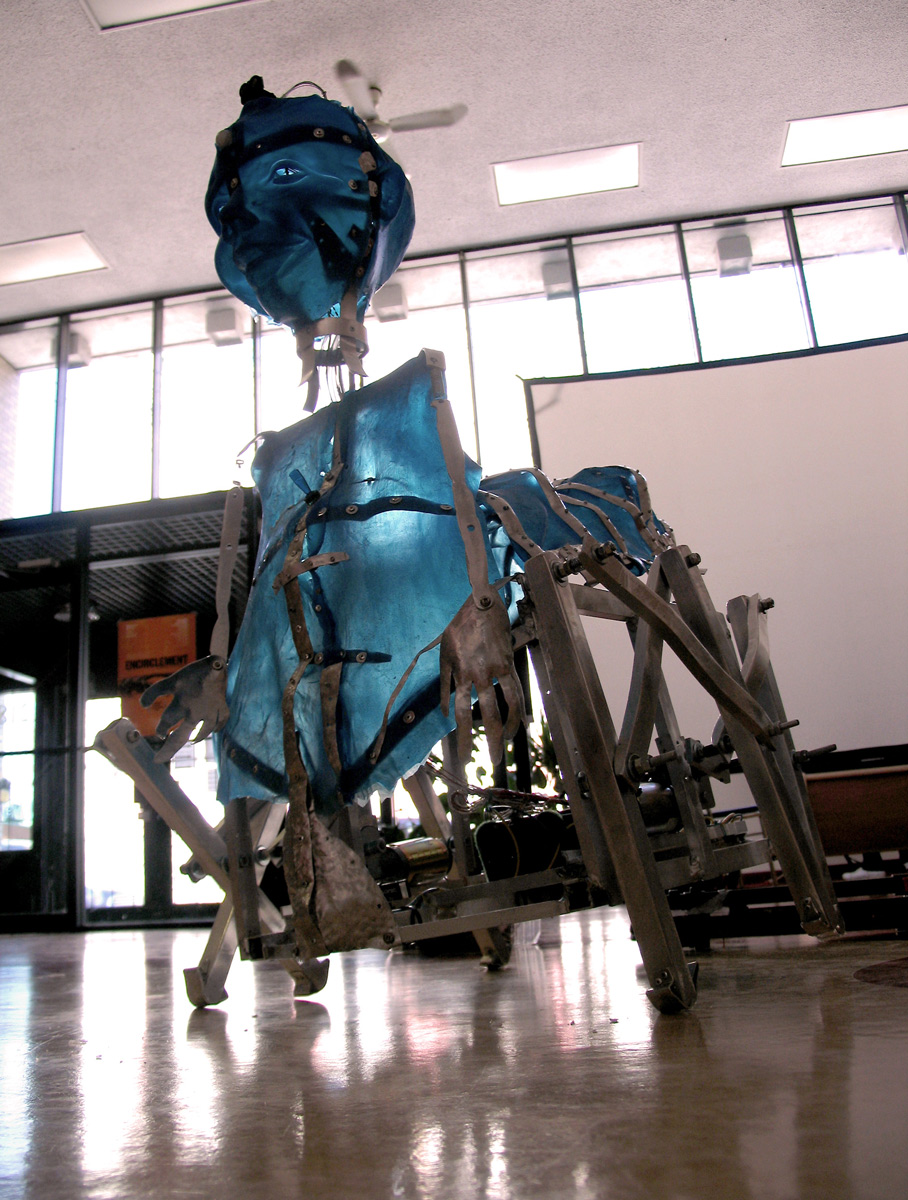
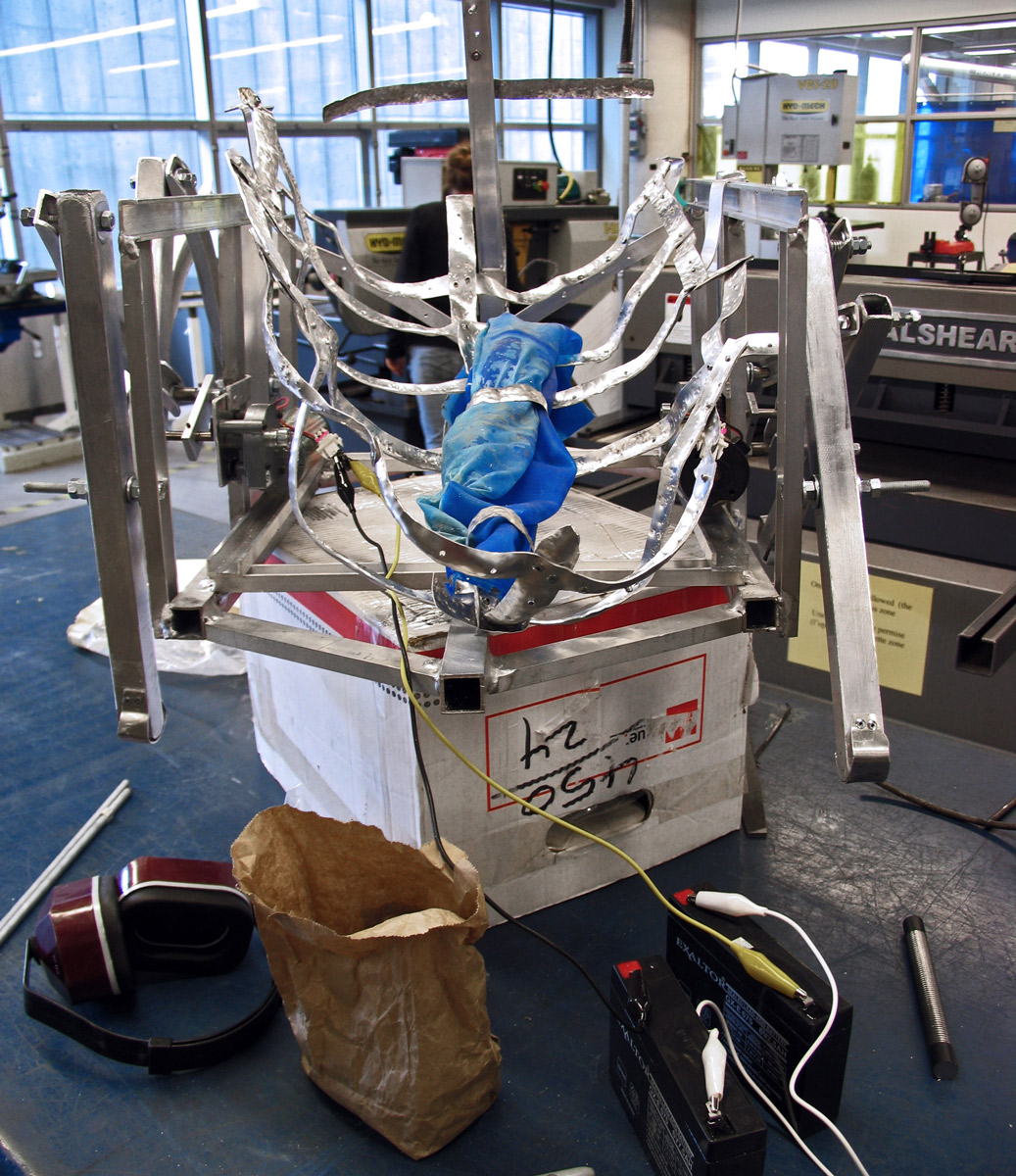
I was aiming at something equal parts manic, mis-programmed walking machine, and over-talkative object that refused to leave the viewer alone.
I recorded a voice loop of trivia that got activated as the viewer went near the piece.
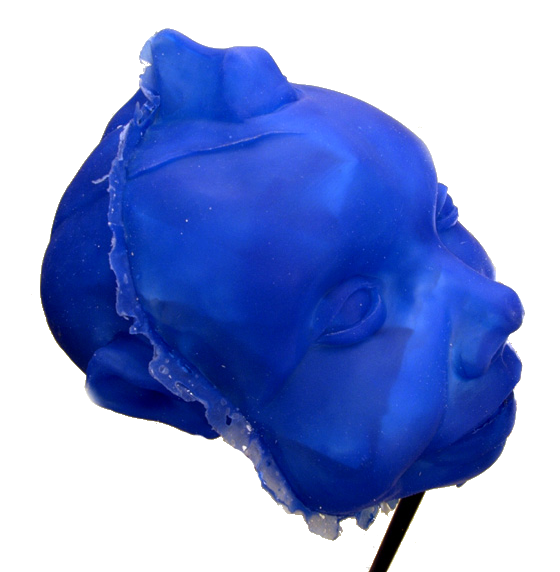
The result was a vaguely caricaturish blue rubber robot that never walked properly, limping awkwardly, or hanging helplessly, with its little aluminum stick legs hanging in mid-air.
It wasn’t till I finished casting the blue rubber body that I realized that the little avatar was also a product of my internalized rememberance of the visual culture I grew up with. And it was all an assemblange of foreign cultures that gained a kind of equivalency in my internal landscape. Saints and demons; Easter bunny and topo gigio; Ultraman, Godzilla and el chavo del ocho; they were all the same to me. None of them originated in my city and though they fascinated me, I saw no difference between santa claus or jesus and the malevolent radioactive octopi of my favorite japanese cartoons.





Excerpt of  recorded trivia
recorded trivia

There are more insects in a single square mile of fertile soil than there are people on the entire earth.
And… did you know… that… Elephants can hear through their feet?
The adult heart pumps about 7,500 litres of blood every day.
Ed “Big Daddy” Roth, the pioneer of custom hotrods, believes that hot rod culture was ruined by the Beatles, because kids spent all their money on records and began using garages for band practice.
Thomas Wedders, the English circus freak, had a nose which was seven and a half inches long.
There are more bacteria and microbes in our body than actual cells that make up the body.
An ostrich’s eye is bigger than its brain.
The blue whale can produce the loudest sound produced by an animal – up to 188 decibels – and detected as far away as 853 kms (530mi).
If you shrunk a car to the size of a roach, the roach could outrun the car. Roaches can run about 200 scale miles per hour.
The first pinball machine game was the “whoope game” in 1930 built by the In and Outdoor game company of Chicago
The average person has over 1,460 dreams a year.
The planet Saturn has a density lower than water… So, if you could place it in water it would float.
Ghengis Khan’s cavalry invented powdered milk! They’d milk their horses and dry it in the sun and carry it with them in all their raids and campaigns.
The average person falls asleep in seven minutes.
Starfish don’t have brains.
The safety pin was invented by Walter Hunt of New York City on April 10, 1849. It took him three hours from when he thought of it, to making one and trying it out.
There’s no rats in Alberta.
Chewing gum was invented by a dentist, named William Semple – as a way to exercise your jaws.
The lightning bolt is 3 times hotter than the sun.
There weren’t rats in Iceland till the seventeenth century.
If Mount Everest were placed at the bottom of the deepest part of the ocean, its peak would still be a mile underwater.
There is enough fuel in a full tank of a jumbo jet to drive an average car around the world four times.
Gallium is a metal which would melt on the palm of your hand, because its melting point is only (29.76 °C)
In 1650 Archbishop James Ussher calculated that the exact moment of Creation to be: at nightfall, Saturday 22 October, 4004 BC.
