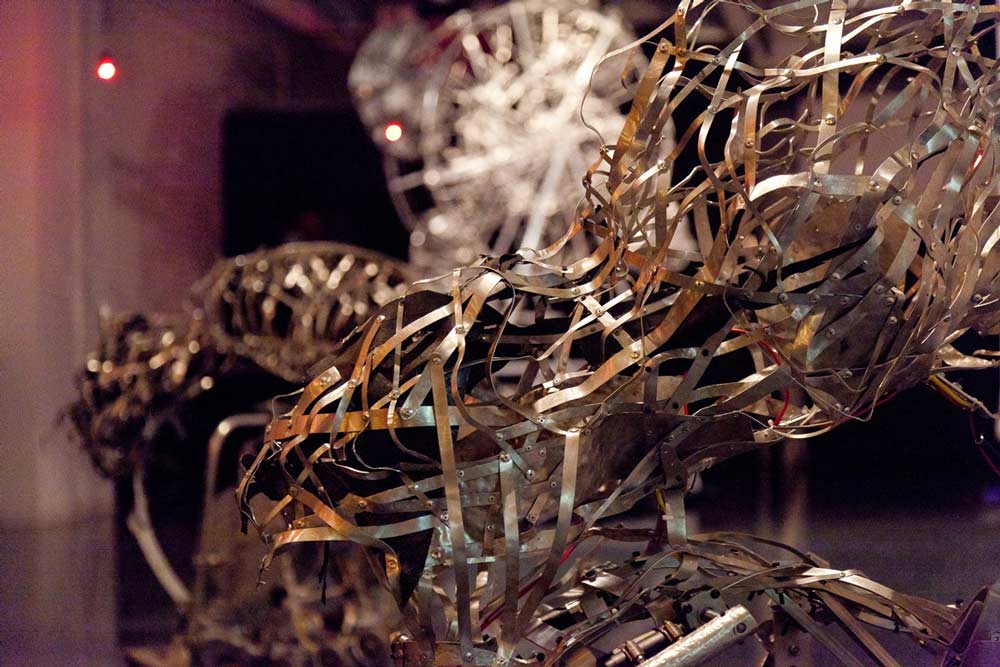
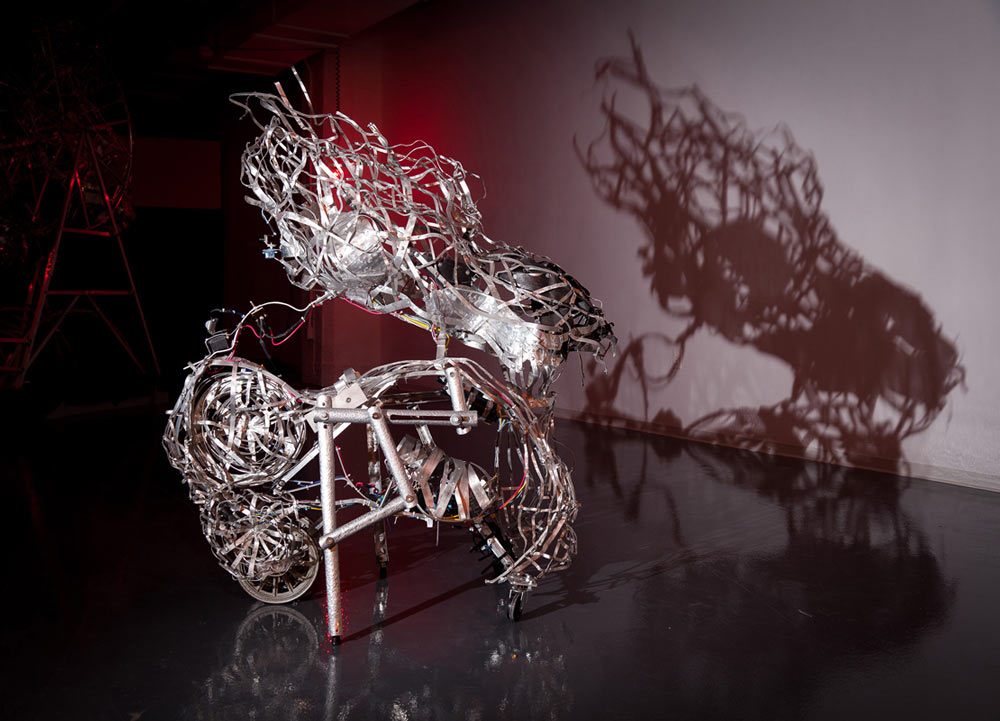
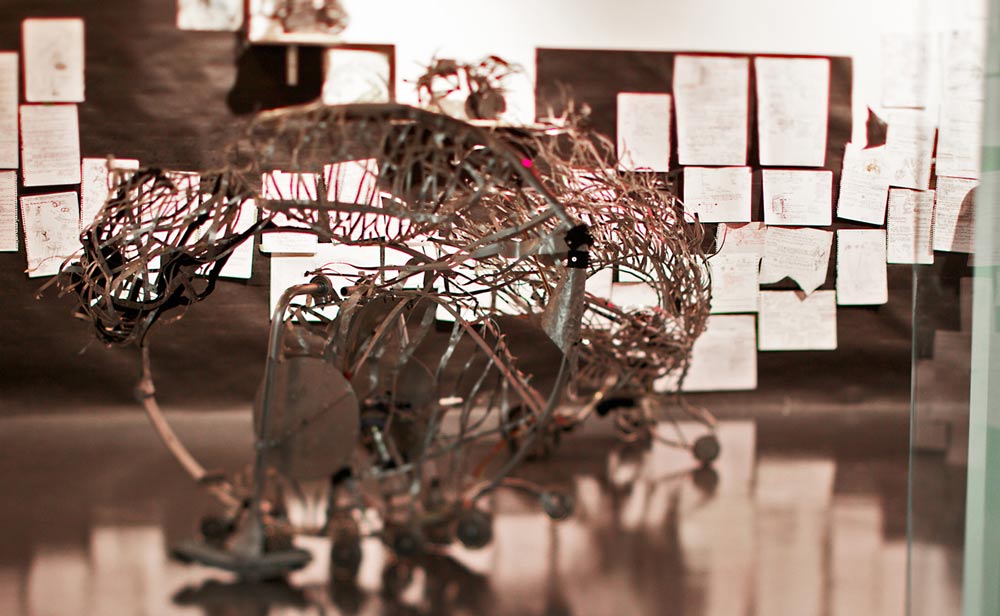
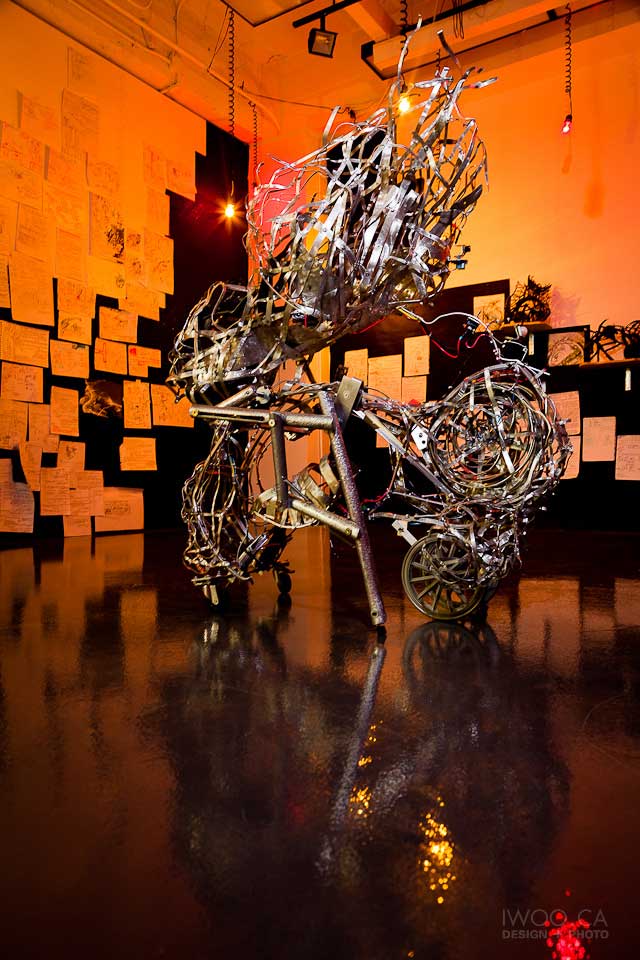
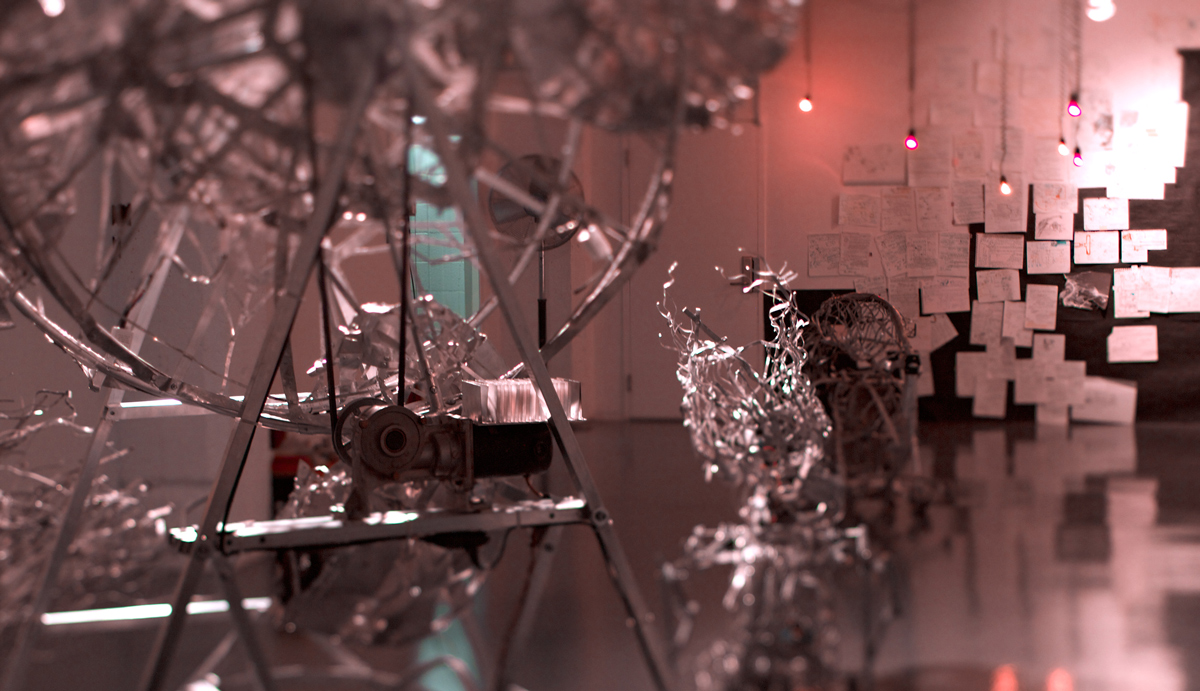
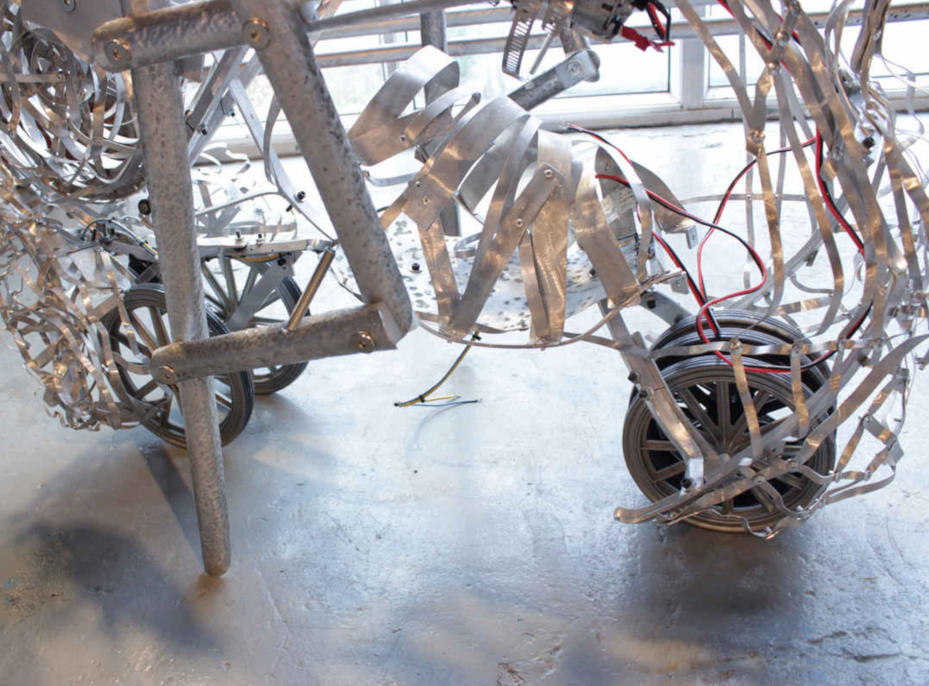
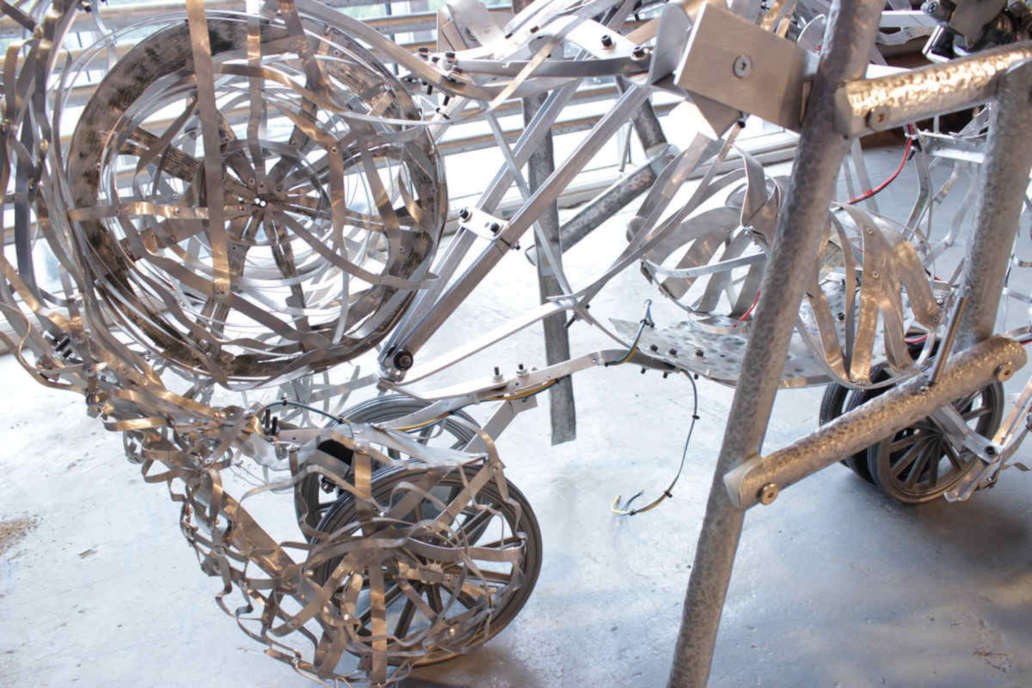
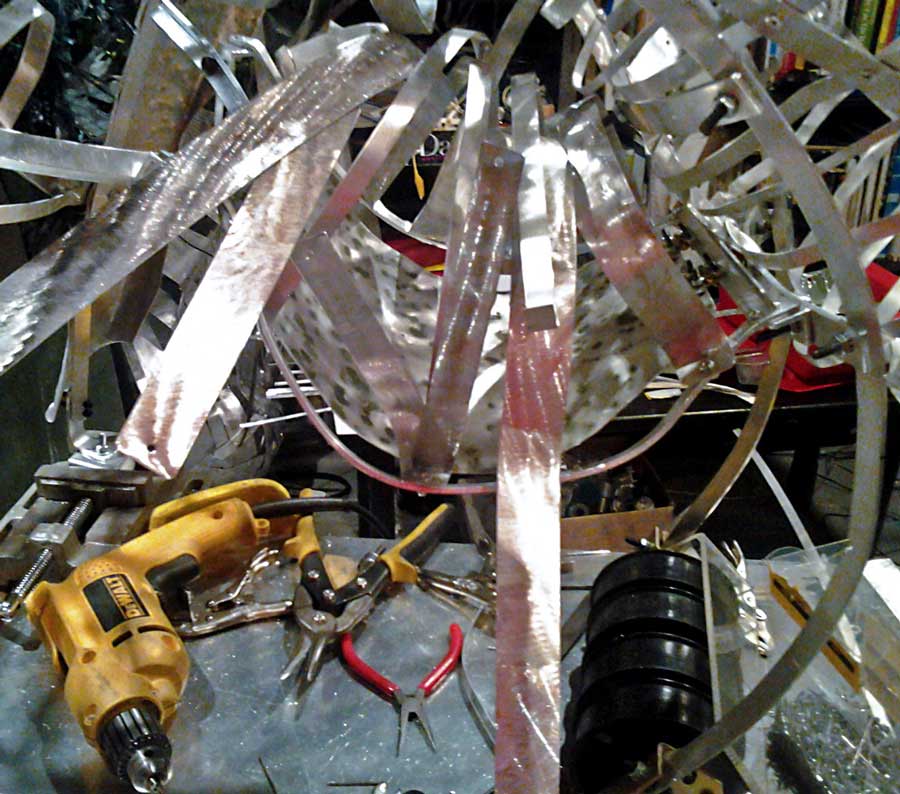
Humo, Leche y Miel (Smoke, Milk and Honey) began as my MFA thesis project. It consisted of four robots and a ferris wheel. the robots, (nick-named, “Walker,” “Porcupine”, “Blob” and “Rocker”) ranged from four to five feet in height, three to five feet in length. The ferris wheel was ten feet tall.
For me, beauty is never a surface frippery, it is always a result of, and intensely inter-connected with, whatever system it arises from. And I’m not interested in nailing down what constitutes beauty. But I am interested in why my forms are relentlessly organic and zoomorphic. What are the implications of ‘Beauty’, or ‘Ugliness’ when working with robotics and new media, which are functional and interactive? Why do I seem to follow a certain aesthetic form? This was central to this project.
I had became drawn to 18th and 19th century aesthetic theories, and with how they were applied to the English landscape. I loved Lancelot, ‘Capability’ Brown, though in his way – ripping up ancient groves, flattening insufficiently picturesque villages, flooding pastures to create fake lakes, ruins, and carefully orchestrated vistas, he wreaked as much havoc as a golfcourse on the landscape. During his lifetime (1716 – 1783) he, and other landscape architects, were hired by the landed gentry and aristocracy to invent the bucolic myth of the ‘natural’ English landscape on their great estates, at the same time that their factories, large-scale mining, marsh-draining, canal-building, urbanization, enclosure, and de-forestation were beginning the cycles of pollution, ecological disaster, and disappearance of traditional husbandry in the rest of the UK.