it ‘s warm in Montreal!
I hope this means that I’ll be human again, and that I’ll be able to finally, finally find a way to buy some metal and get back to work on a couple of projects, the main one being: The Blob robot, always meant to be the boorish big brother of Rocker, Walker and Porcupine…part of the “Humo, Leche, y Miel series.

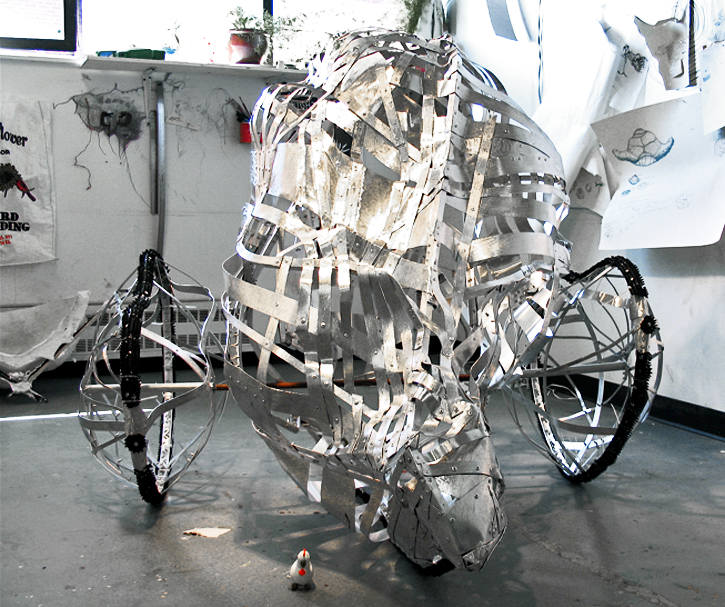
Blob6 ½’ long, 5’ tall, 48” wide. aluminum, rollerskating wheels, rubber, rivets.
Right now, the Blob is an empty shell in my studio waiting to get re-build. Originally I wanted it to be a groaning, autonomous robot that would swerve drunkenly about on kidney-shaped wheels.
Huge fail! Simply put, the mechanics were ridiculous, the amount of power that you need to turn a flabby kidney bean wheel and propel forward a 6 1/2 foot long robot is far more than I could’ve realized by hopeful puttering. And… I’m trying to ease up on my definition of a robot as always being totally autonomous. I’ve been trying to think about alternatives: Remote-control? Wireless? A nesting system that incorporates different hierarchies of control? I’m a builder. It’s hard for me to wrap my head around creative coding. But I would really like to try. And, it occurs to me that Blob’s unwieldiness, which might be disastrous in a group show or around its siblings… might work ok. out-of-doors.
 So, here’s my plan: I want to try to finish this by the end of this summer. I want to take the blob out for a walk like a giant dog on a leash.
So, here’s my plan: I want to try to finish this by the end of this summer. I want to take the blob out for a walk like a giant dog on a leash.
I’m going to put it back together and build the circuitry so that it is somewhat weather-proof. I’m going to attach training-wheels to its rear-end and its front. In this way, the misshapen wheels won’t be load-bearing, but more like canoe oars, simply there to push it forward and back… like a giant version of the classic wooden pull-toy duck.
But it’s never going to be able to turn a tight corner…
Another issue that I’m mulling over is suspension: I’ve been going through go-kart plans. I think the blob’s wheels need to have a bit of suspension to them, so that they don’t stick, get stuck and force the motors to work too hard. I found the image on the right at a hobby site, it’s the kind of thing that I’ve been trying to imagine as a wheel mount for the blob…
Even if it’s a dirty solution like having bits of steel tubes fitting inside each other with springs, like rocker’s big banana feet. This will lead to power loss though, so I have to be careful. And I’m not sure how to build the motor mounts. The blob is so asymmetrical and weirdly shaped that the wheels need to be mounted quite far from the body in order to get proper clearance… I’ll see!
I have two other projects I want to build this year, and a lot of trouble-shooting on the poor brainless ones. I don’t know if I can afford to build any of them, so I will focus on the giant empty robot that I already have sitting in my studio.
