Trying to build the blob 'robot' has shown me this better than anything. And I don't want to abandon the Blob, but I'm far from getting it working the way that I want.
I'm in love with the idea of building a robot that's big, super-light, semi-autonomous. I want a slow-moving beast that can wander the urban landscape.
I showed the latest version of the blob at the Eastern Bloc here in Montreal as part of the Robotis Personae exhibition, January 22-February 11, 2015. I decided to hang the blob from the ceiling instead of trying to make it move around. That in itself was a huge sadness for me.
Right now, this is not a robot.
It's a noisy, beautiful and brainless hunk of metal.
I built the original skeleton by riveting sheet aluminum over a frame of heat-bent aluminum channel stock. I wanted to try to build a large, light robot that would bounce awkwardly on misshapen-wheels, forever on the point of tipping over... And this has made everything difficult!
How do you get not-round wheels turning smoothly? How do you keep something on the verge of tipping over from actually tipping over? Right now, the answer is, you don't.
Pulley-boxes: fun nightmare
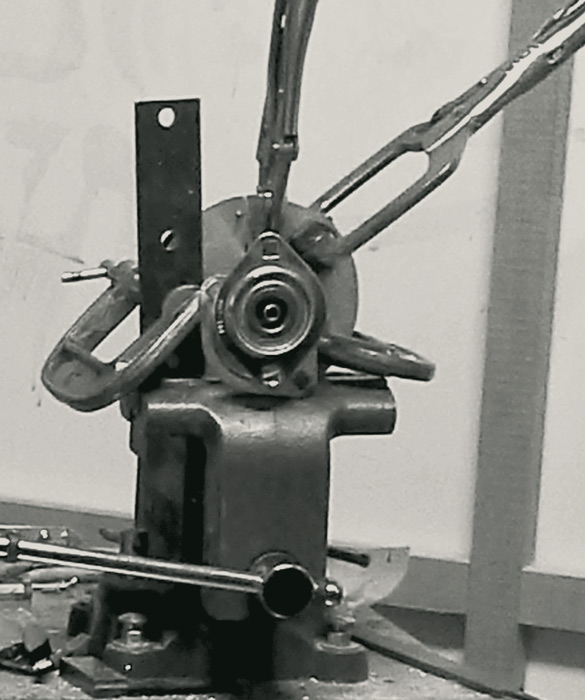
I built 2 pulley-boxes in order to slow down the motors and increase the torque enough to make the oddly-shaped wheels spin. I'd never tried to build a pulley-box before, it was a fascinating process that I meant to document step-by-step.
... But... as I worked, I realized that without access to the proper equipment, though the end result is functional, they look shabby and shoddily-built. Not something I want to show off!
With each project that I make, it's always a struggle to find and buy the necessary supplies. The 2 pulley boxes were no exception. I had 2 surplus dc gear-head motors that I thought were strong enough, and some steel tubing that would work as an output shaft, so I wanted to find 4 pulleys, with a specific internal diameter. After looking at a baffling amount of pulleys and timing belts online I wound up going to the General Bearing Service (GBS) store here in Montréal.
I plunked my motors down on the counter and the staff diligently and patiently searched through catalogues trying to find something based on my sketches and measurements. In spite of my flexibility with the outer diameters, I was there for over an hour, and I'm not sure I could've done it differently. I couldn't build anything without online stores like Digi-key, but sometimes I still find myself trekking out to Abra, Addison's, or GBS down in St. henri. For heavier items like electric motors and hardware, Online deals usually stop being deals when you factor in brokerage fees and shipping.
attaching pulley to the output shaft.
[foogallery id="4581"]
Audio
The best and most unexpected part of this version of the blob is the sound!
It's mostly generated by the wheels turning and spinning lazy-susan bearings attached to their frames. Odd. Amazing. I absolutely want to build upon this accidental audio element.
I also played with a large piezo disc to the motor on one end, and attaching a large surface transducer to the piece with a small amp in between. Sounded exactly like a table-saw.
blob-easter-install from Beatriz Herrera on Vimeo.
I'm seeing how energy is wasted!
I can see how I designed a set of wheels that directed the force down, to 'punch' the ground rather than to roll. I thought if I balanced the blob perfectly on wheels, just having the wheels slamming into the ground would be enough to have the whole piece move forwards of back.
3 obvious errors with this:
Haven't figured out how to balance the blob so that it rolls effortlessly on its own.
I need a secondary set of proper 'drive' wheels in order to have the piece actually rolling forwards and back. This means extra motors, more batteries etc. OR ripping apart the motors and crooked wheels. I don't want to do that.
This piece needs suspension... the piece needs to be able to bounce a little bit so that it can roll smoothly on surfaces that aren't perfectly smooth. I tested this in my studio, which has polished concrete floors, and it made a difference to have the piece on a rough wood floor. Ridiculous! Unacceptable!
The motors are super strong. But the power is lost.
When I dismantled the Blob I saw that the steel cotter pins (2 on each side) that held the wheel shafts to the output shaft of the pulley-box had gotten literally shorn off. On the ground next to the piece there were small piles of black dust that turned out to be pulverized rubber from the wheels banging down on the ground with a crazy amount of force. All of that is lost...
[foogallery id="4587"]
Re-design of the whole piece is necessary!
The blob's weight still means that it needs massive motors (in hobby robotics terms).
As soon as the motors get bigger and heavier, the motor mounts, shafts, wheels all need to increase in size. I'm also only working with aluminum right now, which is far lighter than steel. But it isn't as strong. I might have to change materials for bearing mounts, shafts, main frame etc. this will also increase the weight and energy requirements... more batteries which means a LOT more money.
I'm undecided between two options for the drive mechanism:
Wheelchair motors. Incredibly heavy, but powerful and rugged. I already have a pair in my studio.
Find electric bicycle or scooter type gas engines. I've never worked with gas motors. Also, this would mean that I could only run the blob out-of-doors. I would love to do this! BUT, it also means a level of robust and safe design that I haven't attempted to tackle before.
I'm worried about time and money. I think I'm going to start harvesting metal stock from my older sculptures to re-build.
pulley-boxes from Beatriz Herrera on Vimeo.
a test of the pulley-boxes that I made for the blob robot
I need to leave this aside for a bit in order to begin a new robotics project this Spring.
BUT... I don't want to totally forget this piece! I have a skeleton to work with, experiment with!
There's a contradiction in robotics: it's impossible to sketch out a movement without going through several maquettes... but it's impossible to expect to be able to scale up a project without understanding a bit of the physics of power transmission and force...
There's problems that I need to resolve and understand here!
Published by Beatriz
Beatriz Alejandra Herrera is a Montreal-based visual artist who loves ceramcis, electronic arts, and drawing.
View more posts
 Trying to build the blob 'robot' has shown me this better than anything. And I don't want to abandon the Blob, but I'm far from getting it working the way that I want.
I'm in love with the idea of building a robot that's big, super-light, semi-autonomous. I want a slow-moving beast that can wander the urban landscape.
I showed the latest version of the blob at the Eastern Bloc here in Montreal as part of the Robotis Personae exhibition, January 22-February 11, 2015. I decided to hang the blob from the ceiling instead of trying to make it move around. That in itself was a huge sadness for me.
Trying to build the blob 'robot' has shown me this better than anything. And I don't want to abandon the Blob, but I'm far from getting it working the way that I want.
I'm in love with the idea of building a robot that's big, super-light, semi-autonomous. I want a slow-moving beast that can wander the urban landscape.
I showed the latest version of the blob at the Eastern Bloc here in Montreal as part of the Robotis Personae exhibition, January 22-February 11, 2015. I decided to hang the blob from the ceiling instead of trying to make it move around. That in itself was a huge sadness for me. Right now, this is not a robot.
It's a noisy, beautiful and brainless hunk of metal.
I built the original skeleton by riveting sheet aluminum over a frame of heat-bent aluminum channel stock. I wanted to try to build a large, light robot that would bounce awkwardly on misshapen-wheels, forever on the point of tipping over... And this has made everything difficult!
How do you get not-round wheels turning smoothly? How do you keep something on the verge of tipping over from actually tipping over? Right now, the answer is, you don't.
Right now, this is not a robot.
It's a noisy, beautiful and brainless hunk of metal.
I built the original skeleton by riveting sheet aluminum over a frame of heat-bent aluminum channel stock. I wanted to try to build a large, light robot that would bounce awkwardly on misshapen-wheels, forever on the point of tipping over... And this has made everything difficult!
How do you get not-round wheels turning smoothly? How do you keep something on the verge of tipping over from actually tipping over? Right now, the answer is, you don't.